BibTeX
@INPROCEEDINGS{10536574,
author={Liu, Changkun and Zhao, Yukun and Braud, Tristan},
booktitle={2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
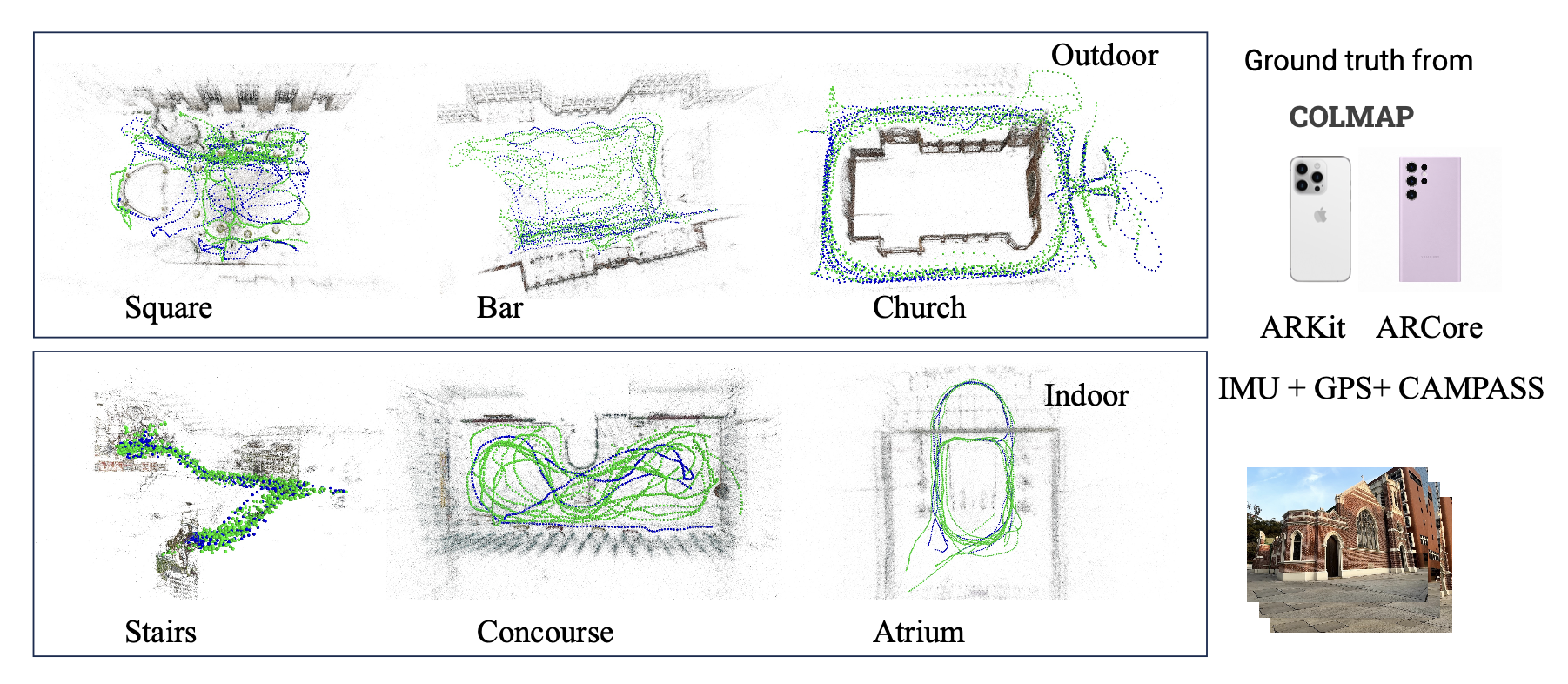
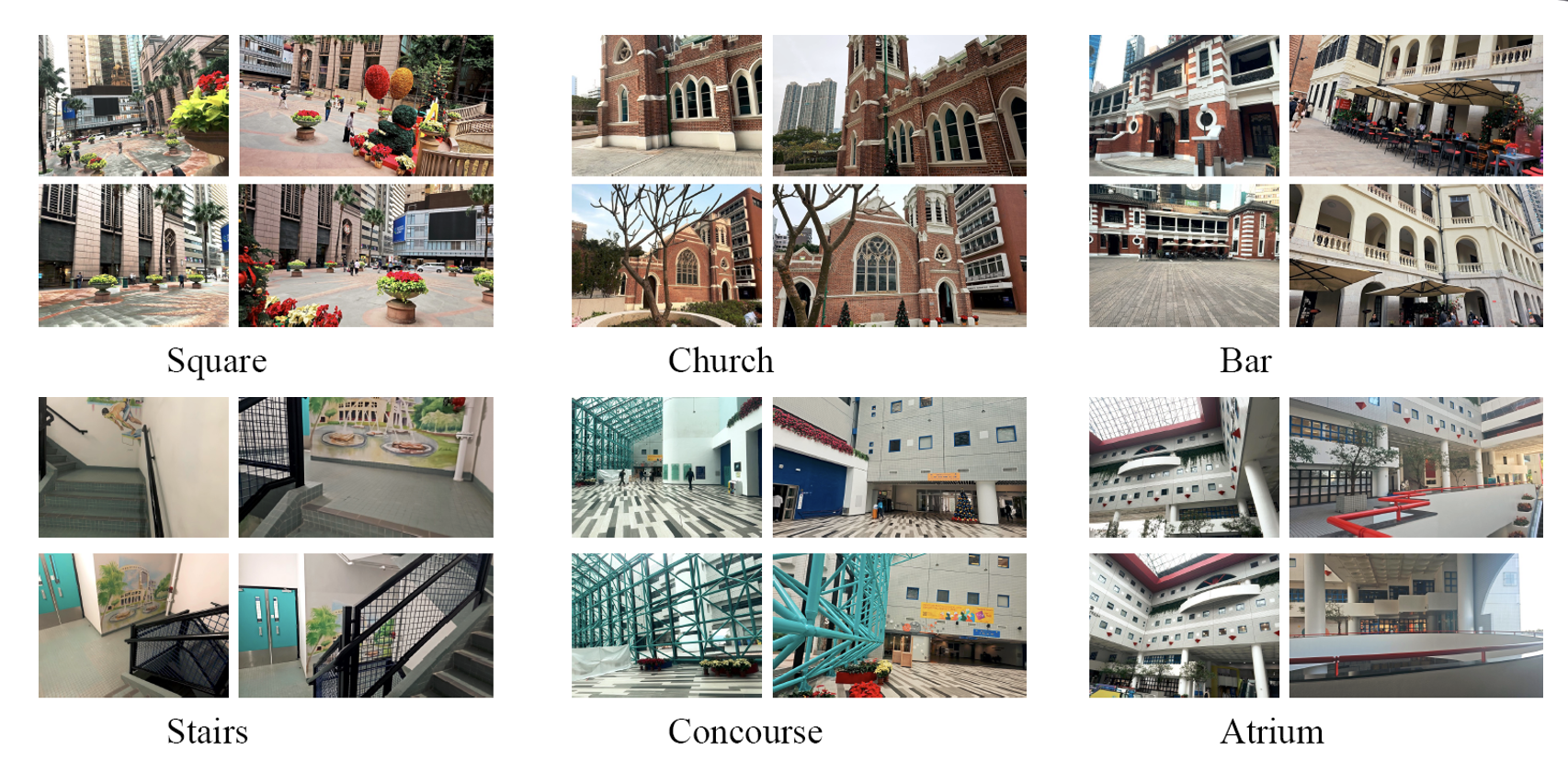
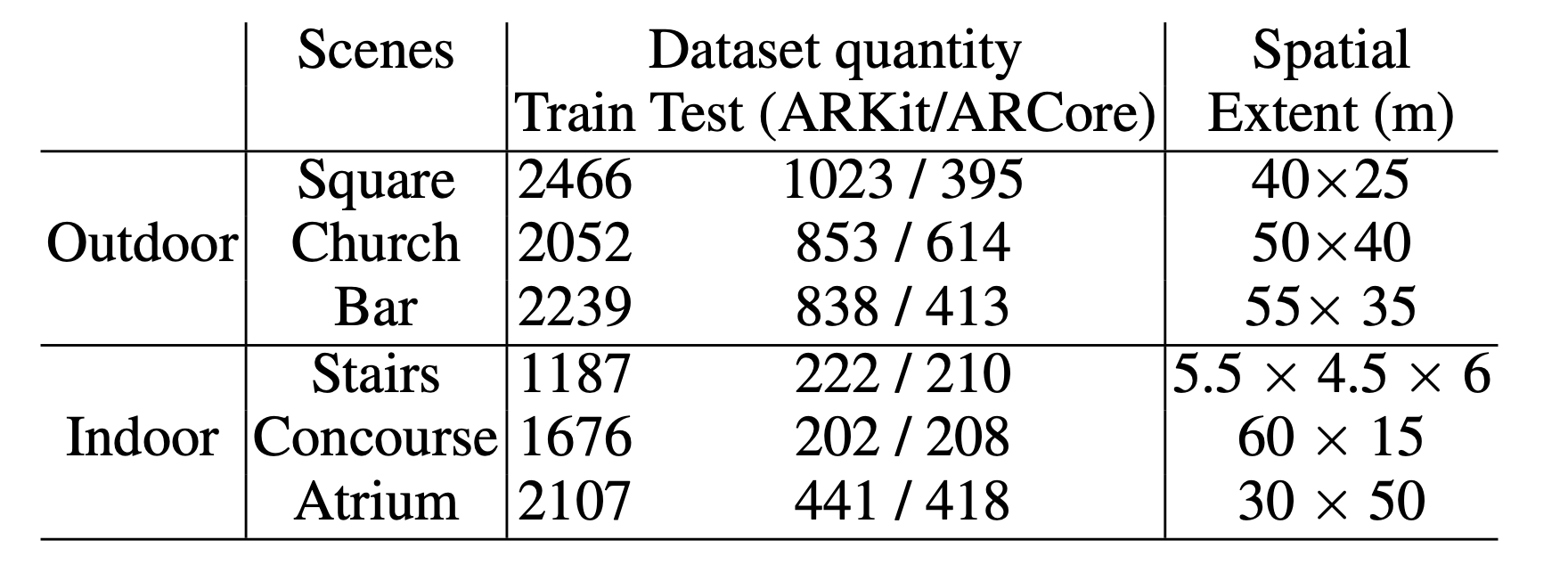
title={MARViN: Mobile AR Dataset with Visual-Inertial Data},
year={2024},
volume={},
number={},
pages={532-538},
keywords={Performance evaluation;Visualization;Solid modeling;Three-dimensional displays;Pose estimation;User interfaces;Cameras;Visual localisation Dataset—Camera pose regression—Visual-Inertial Odometry—Visual positioning system;Computer Vision—Augmented Reality},
doi={10.1109/VRW62533.2024.00103}}